Здесь мы собираем самые интересные статьи, интервью, репортажи и многое другое.
Вибростенды для транспортных испытаний

Текст подготовлен: Григорий Романенко, глава представительства фирмы «Брюль и Къер» в РФ
Испытания с использованием нескольких вибростендов с воздействием в одном направлении могут повысить качество проводимых работ, но такая «добавленная сложность» должна учитываться на ранних этапах проектирования испытательной вибрационной установки.
В настоящее время наблюдается рост потребности использования вибростендов для транспортных испытаний все более крупных и сложных по структуре объектов, чтобы заменить комплексные дорожные испытания. В таких случаях объединение нескольких вибростендов для совместной работы по одной оси может быть лучшим решением, чем попытка использования одного, большего по размеру и мощности вибростенда. Этот метод все чаще применяется в качестве стандартизованного подхода, в частности при испытаниях по стандарту MIL-STD-810 на стойкость к механическим внешним воздействующим факторам.
При проведении испытания с использованием нескольких источников возбуждения для воздействия по одной оси (MESA) существует два основных метода управление вибрацией, каждый из которых имеет свои плюсы и минусы в зависимости от применения. Эти методы используют:
- подачу общего задающего сигнала на все вибростенды;
- подачу разных задающих сигналов на каждый вибростенд.
Последний способ предусматривает применение MIMO-системы управления виброиспытаниями и должен учитывать выбор вибростендов, акселерометров, крепежной оснастки и даже технических знаний персонала. Эти вопросы требуют проработки на самых ранних этапах проектирования новой испытательной вибрационной установки, чтобы обеспечить ее оптимальное функционирование и понимание рабочих возможностей.
В статье содержится практическая информация по использованию метода тестирования с несколькими вибростендами MIMO для транспортных испытаний больших объектов, и предлагаются указания для реорганизации испытательных систем с одним вибростендом в системы с несколькими вибростендами. Эти сведения получены в ходе сотен часов проведения реальных испытаний при воздействии гармонической и широкополосной случайной вибрации с использованием 420-кН системы, состоящей из четырех вибростендов LDS V9 в горизонтальном и вертикальном исполнении. Статья также содержит практические соображения инженеров-испытателей и руководителей испытаний при разработке и проектирования стенда для проведения MIMO-виброиспытаний нагрузок большого размера.
1. Введение
Испытания с использованием одного вибростенда с воздействием по одной оси — это надежно отработанный метод для проведения вибрационных испытаний. Но все чаще возникают ситуации, когда применение нескольких вибростендов может стать более рациональным решением. На первый взгляд может показаться, что работа MIMO-системы с несколькими вибростендами сходна с действием системы с одним вибростендом с тем лишь отличием, что вибраторов больше и предусмотрена другая система управления виброиспытаниями. Как правило, производители испытательного оборудования предоставляют информацию по отдельным компонентам, таким как вибратор, MIMO-контроллер, оснастка или акселерометры, в рамках общего решения. Однако при MIMO-виброиспытаниях возникают системные взаимодействия, которые следует учитывать в целом, на самых ранних этапах проектирования новой испытательной вибрационной установки, что обеспечить ее оптимальную эксплуатацию и понимание рабочих возможностей.
В последующих разделах содержатся в том числе рекомендации по созданию комплексного решения MIMO-системы. Они включают указания по выбору испытательного оборудования и оснастки, а также по использованию расширителей и столов скольжения. Однако, поскольку MIMO-испытания — это более сложная область, чем испытание с одним вибростендом, в статье даны методические рекомендации по контуру управления как по выбору акселерометра, так и по самой стратегии управления, указаны различные факторы, на которые следует обращать внимание при контроле многоточечного возбуждения/отклика (MIMO) по сравнению с управлением вибрационным возбуждением по одному выходу. Кроме того, представлен опыт использования методов для быстрой оптимизации контроля испытаний для соответствия условиям испытательного центра, включая ключевые параметры оборудования, имеющие заметное влияние на достигнутый уровень контроля. Также в статье показана возможная оценка результатов и отчеты по испытаниям в соответствии с регламентами стандарта MIL-STD-810 G (Метод 527 и 514.6) и даны предложения по дополнительному анализу данных, который создает представление о резонансном поведении полезной нагрузки.
2. Рекомендации по выбору испытательного оборудования и крепежной оснастки
Тип и количество вибростендов, выбранных для вибрационной MIMO-системы, зависит от размера и формы полезной нагрузки, а не только от типа проводимого испытания. Поэтому на самых ранних этапах проектирования системы важно учитывать распределение массы полезной нагрузки и вероятные динамические характеристики. И хотя возможно совместное использование различных типов вибростендов с MIMO-контроллером вибрации, необходимо помнить, что чем меньше сложность внутрисистемного взаимодействия, которым придется управлять, тем лучше управление. Поскольку наземная полезная нагрузка, скорее всего, имеет собственную сложную динамику, остальная система должна быть минимальной сложности. Поэтому при выборе типа вибростенда следует рассмотреть наихудшие условия распределения массы для выработки общих требований к системе. Менее очевидно для тех, кто привык использовать в испытаниях только один вибростенд, то, что применение многоточечного управления, обычного для испытаний с помощью одного вибростенда, не является стандартным подходом к управлению многоточечным возбуждение/откликом — MIMO. Вместо этого обычно предпочитают матричное управление, где количество контрольных датчиков равно количеству вибростендов. Так же, как и для одноточечного управления одного вибростенда, это означает, что контрольные точки могут проходить через частоты резонанса и антирезонанса (узлов) в пределах частотного диапазона испытания. Поэтому целесообразно выбирать вибростенды большей мощности, выходящей за рамки теоретических расчетов.
Особое внимание следует уделить методу крепления полезной нагрузки. Использование расширителей и столов скольжения приводит к дополнительному динамическому воздействию (и потому — к сложности в управлении), чего следует избегать. Однако на практике, при проведении испытаний нагрузок различных форм и размеров, горизонтальные и вертикальные столы зачастую просто необходимы. Система управления виброиспытаниями предполагает линейную зависимость уровня возбуждения для режимов предварительного тестирования с низким уровнем, где могут преобладать фрикционные эффекты и шум сигнала, и более высоких уровней полного испытания, где фрикционный и шумовые эффекты ничтожны. Поэтому все динамические движущиеся элементы системы вибростенда нужно выбирать таким образом, чтобы минимизировать трение и избежать перевозбуждения системы на низких частотах. Подробней ситуации, подпадающие под это описание, рассмотрены в разделе 4.1. Динамические характеристики полезной нагрузки также являются важным фактором. Тяжелая полезная нагрузка большого размера испытывает расширение под воздействием тепла, статическое провисание, динамический изгиб и скручивание. При испытаниях с использованием одного вибростенда эти силы часто компенсируются, так что на вибростенд воздействуют силы или моменты с минимальным значением. Для сравнения: при использовании системы из нескольких вибростендов велика вероятность присутствия результирующей силы или момента, которые воздействуют на каждый вибростенд или иную структуру вибрационной системы, как показано на рис. 1.
Рис. 1. Воздействие динамических свойств полезной нагрузки на один вибростенд и систему из нескольких вибростендов
Передачу реактивных сил, возникающих в ответ на резонанс полезной нагрузки в систему вибростенда, можно сократить за счет жесткости оснастки. Оснастка, спроектированная с высоким коэффициентом передачи по оси возбуждения и в то же время угловой и поперечной податливостью, может до минимума уменьшить величину момента, который должна испытывать вибрационная система. Поэтому важно принимать во внимание и рассчитать степени свободы системы непосредственно с момента начала ее проектирования.
3. Защита системы
Хотя механическая конструкция испытательного оборудования является важной гарантией выдерживания воздействий значительных реактивных сил, сопутствующих испытаниям наземных полезных нагрузок большого размера, организации контура управления необходимо уделять значительное внимание. Рекомендуется в вибрационной системе обеспечить наличие средства одновременного включения и остановки всех вибростендов контролируемым способом в нормальном состоянии и в условиях отказа, например, в случае блокировки или аварийной остановки. Иначе дополнительное напряжение и повреждение может возникать как на полезной нагрузке, так и на вибрационной системе. Хотя оснастка должна иметь строение, сводящее к минимуму передачу реакции полезной нагрузки, дополнительно можно использовать проверочные акселерометры в поперечном исполнении для защиты вибростендов от испытываемых моментов, превышающих граничные значения. Однако не следует полагаться на это при нормальных режимах из-за возникновения ограничения управления.
4. Различия между контуром управления системы MIMO с несколькими вибростендами и системы с одним вибростендом
4.1. Матрица идентификации системы
Обычно перед стартом MIMO-испытаний с гармоническим и случайным возбуждением вибрации запускается матрица идентификации. Она описывает взаимодействия, включая фазовые отношения между каждым сигналом возбуждения и контрольным откликом по всему частотному диапазону испытания. Сначала проводится испытание случайным возбуждением без установления взаимных спектральных связей между вибростендами, и это является основой для начального управления, применяемого при проведении испытаний на воздействие гармонической или случайной вибрации. Как говорилось выше, предполагаются линейные отношения уровня возбуждения для режимов с низким максимальным уровнем испытания, которые могут быть подвержены воздействию трения, шумов и нелинейного резонанса, переходных процессов. Линейные отношения между испытаниями низкого и высокого уровня имеют гораздо большее значение при MIMO-испытаниях, чем в случае испытания с одним вибростендом, где управление обычно основано на отклике акселерометра, а не на предварительно сохраненных связях. Причина в том, что системы управления испытаниями для одного вибростенда, как правило, имеют более быстрое адаптивное управление благодаря более простым требованиям, предъявляемым к контролю. При проведении испытания со случайным возбуждением идентификационная матрица обновляется, и эти данные могут вноситься в память для использования в последующих прогонах. Это особенно полезно для сложных нагрузок, не имеющих линейных динамических характеристик.
4.2. Взаимные спектральные связи: фаза и когерентность
Проведение испытания с несколькими вибростендами, действующими в направлении только одной оси (далее — по одной оси), — это не просто определение профиля амплитуды колебания по диапазону частот. По мере того как частоты приближаются к первому резонансу системы и превышают его, полезная нагрузка перестает двигаться равномерно по оси возбуждения. При испытаниях полезной нагрузки на одном вибростенде часто используется многоточечное управление, так что изменение амплитуды колебания в различных точках нагрузки учитывается с помощью методов управления по среднему или по максимуму. Аналогично, если измерялось фазовое соотношение между акселерометрами в испытании с многоточечным управлением, можно увидеть в результате разность фаз между различными контрольными точками. Эти фазовые отношения не влияют на управление, поскольку учитывается только амплитуда колебания, а получающийся момент гасится вибрационным столом.
При проведении испытания с несколькими вибростендами, действующими в одном направлении, взаимные спектральные отношения между контрольными точками имеют гораздо большее значение, поскольку при MIMO-испытаниях для каждой контрольной точки происходит оптимизация не только профиля амплитуды, но и фазы и когерентности между положениями всех контрольных акселерометров. При испытаниях по одной оси слишком просто полагать, что отношения фазы и когерентности между акселерометрами в контрольных точках будут равны нулю градусов по фазе и с когерентностью близкой к 1 по всему диапазону частот. Такие условия не соответствуют реальным, а попытка контролировать нулевую фазу и высокую когерентность при резонансе приведет к испытаниям полезной нагрузки в чрезмерном объеме. Важно понимать, что когерентность, близкая к 1, не должна считаться «хорошей», так же как и когерентность, близкая к 0, не должна считаться «плохой». Вместо этого, когерентность должна восприниматься как «высокая», когда динамические свойства полезной нагрузки позволяют контрольным точкам быть сильно взаимосвязанными, и когерентность должна восприниматься как «низкая», когда контрольные точки слабо связаны между собой, что обычно случается при резонансе и при доминировании широкополосной энергии, генерируемой полезной нагрузкой над сигналом возбуждения вибростенда.
4.3. Обычное управление по четырем точкам в сравнении с многоточечным управлением
Управление вибрации при MIMO предполагает, что все сигналы возбуждения и управления одновременно используют матричные связи и оптимизируют задающие сигналы каждого вибростенда для получения нужного профиля амплитуды, фазы и когерентности в каждой контрольной точке. Возбуждение каждого вибростенда влияет на все контрольные точки, а не только на наиболее тесно связанными с ним, и точность управления зависит от сложности динамических процессов в системе. Поэтому управление MIMO не должно рассматриваться как простое независимое управление режимами испытаний соответствующими контрольными акселерометрами, но должно восприниматься с точки зрения взаимодействия с другими контрольными точками. Это означает, что если, например, предположить, что при проведении испытания воздействием случайной вибрации на системе с четырьмя вибростендами в трех контрольных точках воспроизведение профиля будет точно соответствовать заданному, а в четвертой будет превышение из-за резонансного поведения, то в условиях реального MIMO-испытания в трех положениях контрольных точек будет наблюдаться тенденция к отклонению от своих заданных профилей, чтобы в четвертой точке достичь более близкого соответствия. Значит, при резонансной частоте отклик каждого канала управления может выглядеть как отклоняющийся от профиля, однако при просмотре взвешенной средней амплитудно-частотной характеристики на каналах управления видно, что общее управление оптимизировано. С этой точки зрения управление MIMO сходно с обычным многоточечным управлением, которое используется в системах с одним вибростендом.
4.4. Выбор акселерометра
Производители систем управления MIMO-виброиспытаниями рекомендуют использовать акселерометры с высокой чувствительностью для того, чтобы обеспечить необходимый уровень сигнала для управления фазой. При этом испытания с одним вибростендом проводятся с помощью акселерометров чувствительностью в 10 мВ/g, а для MIMO-систем требуются акселерометры, имеющие величину 100–1000 мВ/g.
Наземные полезные нагрузки большого размера часто состоят из нескольких компонентов в модульном блоке или контейнере. Как и вся конструкция подвержена резонансу, так и отдельные компоненты тоже резонируют и могут дребезжать. При испытаниях тяжелой полезной нагрузки большого размера на MIMO-системе есть вероятность, что подвижная масса нагрузки будет значительно превосходить массу вибростендов. В результате способность всех вибростендов вместе со столами и крепежной оснасткой демпфировать переходные процессы, связанные с динамическим поведением полезной нагрузки, будет весьма ограниченной по сравнению с испытаниями малых нагрузок. Кроме того, доступные местоположения для контрольных акселерометров больше ограничены, чем при испытании на одном вибростенде с использованием стола скольжения и расширителя. Это означает, что контрольные акселерометры должны иметь более высокую чувствительность и диапазон измерения ускорения, чтобы приспосабливаться к переходным процессам без перегрузок. Данные требования по чувствительности и диапазону измерения ускорения обратнозависимы конструкции акселерометра. IEPE-акселерометры со встроенным предусилителем отвечают следующему соотношению:
чувствительность (мВ/g) × диапазон измерения ускорения (g) = 5.000–7.000
То есть для акселерометра чувствительностью 500мВ/g ускорение в переходном процессе выше пиковых 14g приведет к перегрузке.
Опыт показывает, что зарядовые акселерометры являются лучшим решением при проведении испытаний с незатухающими переходными процессами. Поскольку преобразователи заряда в напряжение находятся в отдельном блоке, удаленном от динамических процессов полезной нагрузки, появляется возможность использования значительно более высокого диапазона измерений (до момента перегрузки), в зависимости от выбора согласующего усилителя. Таким образом, соотношение может быть преобразовано в следующий вид:
чувствительность (pC/g) × диапазон измерения ускорения (g) = 10.000–100.000
5. Рекомендации по стратегии управления
5.1. Профиль идентификационной матрицы
Для расчета матрицы идентификации системы необходимо уделять внимание разработке профилей случайного возбуждения, особенно для последующих испытаний с гармоническим возбуждением. Опыт показывает, что применение максимально допустимого уровня возбуждения, особенно на частотах известных резонансов, помогает расчету линейного отношения между испытаниями низкого и высокого уровня. Однако при квалификационных испытаниях с более низким уровнем возбуждения, чем для расчета идентификационной матрицы, есть вероятность, что рассчитанная идентификация не подойдет. Например, если идентификационная матрица запущена при –3 дБ полного уровня испытания, то она может не подойти для описания взаимодействия между сигналами возбуждения при –6 дБ полного уровня испытания.
И наоборот, поскольку идентификационная матрица используется для определения связей сигналов возбуждения, разумней минимизировать уровень для профиля низкой частоты с целью уменьшения значений смещения и предотвращения повреждения полезной нагрузки. Так, при схеме «тяни-толкай» система управления должна сначала установить необходимый сигнал возбуждения для инвертирования. И при подозрении, что испытание полезной нагрузки происходит с несовпадением по фазе, это должно учитываться в профиле матрицы. Однако уровень возбуждения должен быть достаточным для того, чтобы избежать возникновения эффекта трения и шумов, преобладающих на прогоне для идентификации. Дополнительно профиль идентификационной матрицы должен начинаться при более низкой частоте, чем действительный диапазон испытания, чтобы избежать потери контроля управления на низкой частоте (особенно при испытании с гармоническим возбуждением).
5.2. Оптимизация параметров управления
Для систем управления виброиспытаниями одиночных стендов заводские установки часто настроены для оптимальной работы по большинству сценариев испытания полезной нагрузки, и часто требуется изменить лишь несколько параметров, таких как разрешение или скорость развертки. Типичные же системы управления MIMO гораздо чувствительней к настройке параметров, которые могут отличаться в зависимости от полезной нагрузки. Поэтому может понадобиться помощь более опытного инженера-испытателя, чем при тестировании с одним вибростендом. Для вибрационных систем однозадачного использования (например, системы для испытания спутников) тонкая настройка большого числа параметров может дать преимущества при получении итогового уровня контроля управления испытаниями. Однако для испытательных центров, где проводятся различные виды испытаний для разных объектов, требуется более прагматичный подход. Для улучшения контроля управления с минимальным временем настройки могут быть использованы ключевые подходы, выработанные благодаря многочасовому опыту проведения MIMO-испытаний. Перечень таких подходов и условия по их исполнению описаны ниже.
5.2.1. Испытания на случайную вибрацию
Должны соблюдаться следующие условия:
- наличие идентификационной матрицы — правильная матрица является ключевым фактором для управления испытаниями (см. раздел 5.1);
- сокращение времени обратной связи — уменьшенное время обратной связи повышает скорость выравнивания и обеспечивает оперативную корректировку отклонения управления. Время обратной связи зависит от значения степеней свободы (DOF) и требуемого разрешения. При этом значение DOF характеризует, какая часть нового спектра сигнала управления определяется откликом с последнего акселерометра, а разрешение есть более простой параметр для различных условий проведения испытания, изменяемый в зависимости от диапазона частоты испытания для определенной схемы испытания;
- обеспечение профилей фазы и когерентности. Проще всего запрограммировать фазу на ноль и когерентность на значение, близкое к 1, для одноосевого испытания. Но это значит, что при резонансе обратная связь будет заставлять полезную нагрузку достигать этих профилей в противовес динамической ответной реакции полезной нагрузки. Для того чтобы оптимизировать управление амплитуды по профилю испытания, этого «давления», направленного на достижение неестественной связи фазы и когерентности, следует избегать. Улучшенное управление амплитудой можно получить, вводя номинальные профили отношения фазы и когерентности по диапазону частоты испытания на основании измерения динамических характеристик, полученных во время работы или на основе квалификационного прогона на низком уровне;
- использование альтернативного подхода. В данном случае альтернативный подход — это установка когерентности на ноль и игнорирование фазового соотношения. Однако важно обеспечить защиту направляющей системы вибростенда от воздействия поперечного движения полезной нагрузки особенно при низких частотах, когда перемещение может быть значительным. Поэтому, если крепеж не может компенсировать неплоское движение, следует установить высокое значение когерентности, независимо от номинального отклика нагрузки для частотного диапазона, где смещение достаточно большое, чтобы повредить систему. Профили следует программировать так, чтобы они соответствовали номинальному отклику нагрузки на тех частотах, где смещение невелико.
5.2.2. Испытания на гармоническую вибрацию
Условия:
- наличие идентификационной матрицы. Так же, как и при испытаниях с воздействием случайной вибрацией, правильная матрица служит залогом успешного управления испытаниями (см. раздел 5.1);
- использование ограничительных акселерометров. Ограничительные акселерометры можно применять как для защиты системы от сверхвысокого поперечного ускорения, так и для ограничения пика ускорения по оси возбуждения. Предельные значения необходимо устанавливать только для ограничения реальных экстремальных значений. Если пределы установлены слишком близко к стандартным значениям профиля испытания, управляемость может понижаться из-за того, что система управления «прыгает» между реальными MIMO-контрольными точками и несколькими отдельными проверочными ограничивающими точками;
- наличие полосового фильтра. Поскольку наземная полезная нагрузка большого размера обычно подвержена переходным процессам, это вызывает желание сузить полосовой фильтр. Однако чем меньшую полосу пропускания обеспечивает фильтр, тем медленнее обновляются данные управления. Это замедление более заметно при управлении MIMO, где производятся более сложные вычисления (в сравнении со стандартной системой управления испытаниями на одном вибростенде) и оно возрастает при увеличении количества вибростендов в системе;
- контроль скорости сжатия. Скорость сжатия может иметь заметное влияние на управляющее воздействие и в идеале должна устанавливаться с собственным профилем испытания по частотному диапазону, а не применяться в виде установленного по умолчанию значения на системе управления. При моментальных переходных процессах во время развертки частоты можно использовать низкую скорость сжатия, чтобы избежать чрезмерной реакции системы управления на переходные процессы. Повышенную скорость сжатия можно использовать, когда возникает необходимость сдвига отклика акселерометров и быстрой коррекции амплитуды возбуждения. Однако необходимо следить, чтобы высокая скорость сжатия не вызывала нестабильности управления;
- контроль скорости развертки. Можно сократить скорость развертки на некоторых частотах, чтобы позволить системе управления корректировать амплитуду возбуждения с меньшим шагом. В сочетании со скоростью сжатия этот параметр позволяет оптимизировать управляющее воздействие.
6. Оценка результатов испытания
Испытания с помощью систем, включающих несколько вибростендов, — это развивающаяся область знаний, и стандарт MIL-STD-810G содержит разделы с указаниями, относящимися именно к данному типу испытаний. Однако применение нескольких вибростендов для испытания наземных резонансных полезных нагрузок большого размера все еще достаточно необычно, и испытания на специальной трассе являются более традиционным методом. Многочисленные резонансы и переходные процессы, возникающие на полезной нагрузке такого типа при стандартных допусках, не всегда достижимы, поэтому рекомендуется более тесное взаимодействие с заказчиком испытания. Хорошее качество испытаний возможно при соблюдении всех требований заказчика, особенно при понимании процесса управления резонансной полезной нагрузкой большого размера. Примеры типичных результатов испытания приводятся в Приложении.
6.1. Амплитуда: использование управления по усредненному значению
Например, для вибрационной системы с четырьмя стендами MIMO-система управления виброиспытаниями контролирует каждый угол полезной нагрузки для оптимизации общего контроля плоскости нагрузки, проходящей испытания. Это усложняет понимание того, как именно применять допуски, указанные в стандарте MIL-STD-810G (Метод 514.6), поскольку для многоточечного управления сигнал управления — это обычно комбинированный сигнал, использующий стратегию управления по максимальному, минимальному или среднему значению.
Однако имеющийся стандарт MIL-STD-810G (Метод 527) объясняет, как именно можно рассматривать сигналы с точки зрения их составного характера, усредняя данные акселерометров на общей оси. В случае управления MIMO указанный способ используется не для управления, а только для метода точного представления и оценки результатов. Выходные комбинированные сигналы управления — это средняя пиковая амплитуда при гармоническом режиме или средняя спектральная плотность ускорения (СПУ/СПМ) при случайном режиме от четырех отдельных сигналов. Такие сигналы можно рассматривать как равновесные для профиля с обычной амплитудой или средневзвешенные — при других видах профиля. Необходимый по стандарту MIL-STD допуск ±10% для гармонического режима и ±3 дБ для случайного режима в данном случае должен применяться к этому усредненному значению, чтобы определить, управляема ли конкретная полезная нагрузка в пределах допуска, определенного стандартом.
6.2. Амплитуда: отдельные сигналы управления
Стандарт AECTP 400 дает дополнительные рекомендации по допускам экстремальных значений отдельных сигналов. Это значит, что независимо от того, какая стратегия используется для управления возбуждением при нескольких контрольных точках, по максимальному, минимальному или среднему значению (или среднее расчетное, как в случае MIMO) экстремальные значения определены для отдельных сигналов. Для испытания с гармоническим возбуждением рекомендуется допуск в ±25% для отдельных сигналов для частоты до 500 Гц, хотя для испытания со случайным возбуждением сумма отдельных сигналов вне допустимого диапазона должна быть ограничена максимум до 5% от суммы сигналов в полосе пропускания испытания. Эти указания полезны в качестве ориентировочных значений по допускам для отдельных сигналов управления во время MIMO-испытаний.
6.3. Расчет среднеквадратического значения (СКЗ)
Во время испытания резонансная полезная нагрузка большого размера генерирует широкополосный сигнал, который выходит за рамки диапазона частот, управляемых вибрационной системой.
Стандартный подход расчета среднеквадратического значения случайной спектральной плотности ускорения принимает во внимание только область под кривой между начальной и конечной управляющей частотой. Так, на графике (рис. 2) среднеарифметическое значение рассчитано только для частоты в диапазоне f1–f2. Любая активность, превышающая f2, отфильтровывается и не входит в вычисления. Но будет не лишним регистрировать данные и по более высокой частоте, например 4×f2, для того, чтобы понимать «общее СКЗ полезной нагрузки», поскольку это показывает насколько «активно» откликается полезная нагрузка и происходит ли деградация конструкции во время испытания.
Рис. 2. Спектральная плотность ускорения при испытаниях со случайным возбуждением
Даже при активной откликающейся полезной нагрузке вполне возможно получить ±10%-ный допуск по среднеквадратическому значению среднего и отдельного сигнала в пределах диапазона испытаний f1–f2.
6.4. Фаза и когерентность взаимной спектральной плотности
Из-за динамических процессов на полезной нагрузке все точки управления имеют тенденцию двигаться неодинаково при всех частотах. Без данных измерения динамических характеристик объекта, полученных во время работы, ожидаемые фазу и когерентность можно вычислить, проведя прогон низкого уровня, к примеру –6дБ от номинального режима, и затем сравнивать их значения при полном уровне возбуждения (фактически сначала определяя отклик в процессе квалификационного прогона с низким уровнем). Сдвиг фазы или когерентности демонстрирует изменение поведения полезной нагрузки при условии, что нет никаких других проблем в контуре управления.
При гармоническом возбуждении измеряются отношения относительных фаз отдельных сигналов управления. Выяснилось, что ориентировочные значения допуска в ±10° подходят для применения. Как можно было предвидеть, такой уровень допуска обычно достигается вне резонанса, однако через резонансную частоту можно измерить большую разность фаз.
В испытаниях со случайным возбуждением проверяются фаза и когерентность. При низких частотах когерентность между сигналами управления должна быть на максимально высоком уровне, чтобы избежать поломки вибростенда. Там, где когерентность высокая, например выше 0,5, уменьшение когерентности на 0,2 или более и изменение фазы более чем на ±10° должно подвергаться дальнейшей оценке. Если квалификационный прогон показывает, что номинальная когерентность превышает 0,5, допуски для когерентности или фазы применять не надо, поскольку вибросистеме не грозят никакие повреждения.
Итак, для резонансной полезной нагрузки большого размера типичное отклонение от высокой когерентности будет характеризоваться:
- падением когерентности, сосредоточенном вокруг первого резонанса, в пределах 10–40 Гц для полезной нагрузки большого размера;
- резкими скачками когерентности при резонансе полезной нагрузки на других высоких частотах;
- падением когерентности до 0,2 и ниже при более высоких частотах, например, выше 150 Гц, соответствующих падению возбуждения и необходимых при генерации широкополосного сигнала в самой полезной нагрузкой.
6.5. Участие заказчика испытаний/уполномоченного проектировщика
Не всегда есть возможность поддерживать управление полезной нагрузкой в пределах допусков, установленных стандартами. Например, при испытании с использованием гармонической развертки на резонансных частотах. Поэтому важно разработать подход для количественного измерения и изучения размаха амплитуд. Стандарт MIL-STD-810 G подчеркивает важность установления подходящего значения допусков для конкретной полезной нагрузки. Предварительно установленные допуски не могут применяться ко всем возможным видам полезной нагрузки. Вместо этого может понадобиться рассмотреть и согласовать различные варианты значения допусков и уровня испытания для конкретной полезной нагрузки, что предполагает участие заказчика или уполномоченного проектировщика в проведении испытания.
6.6. Оценка результатов, выходящих за рамки допуска
При наличии результатов, выходящих за рамки допуска, необходимо провести анализ следующих показателей:
- широкополосный пиковый сигнал. Просмотр широкополосных пиковых сигналов во время испытания с гармоническим возбуждением может оказаться полезным для определения состояния: доминируют ли сигналы неустановившегося режима над сигналами управления и достаточно ли динамического диапазона акселерометра;
- сигнал возбуждения. Сигналы возбуждения можно сравнивать между собой и понижать уровень предварительных прогонов для того, чтобы понять, являются ли измеряемые уровни ускорения сгенерированными вибрационной системой или это реакция полезной нагрузки с минимальной долей возбуждения, привносимого вибростендом;
- временная история сигналов управления. Полезно записывать отдельные сигналы управления, используя подходящее для этого оборудование сбора данных, с последующим изучением зон со слабым управлением. При резком увеличении амплитуды относительное смещение между сигналами управления можно проанализировать и понять, приведет ли текущая ситуация к перенапряжению полезной нагрузки или вибрационной системы;
- широкополосный отклик. Для понимания причин резкого увеличения амплитуды можно оценить БПФ отдельных сигналов на частоте увеличения амплитуды и определить, какой уровень помех в широкополосном диапазоне искажает сигнал, и просмотреть видеозапись полезной нагрузки для визуализации источника этих помех.
7. Заключение
Существуют заметные преимущества использования системы с несколькими вибростендами для испытаний полезной нагрузки сложной формы и большого размера. При необходимом уровне управления такое типовое моделирование динамического поведения будет более достоверно, чем на системе с одним вибростендом. Однако по сравнению с испытаниями на системе, предусматривающей один вибростенд, для проведения MIMO-испытаний на системе с несколькими вибростендами требуется новый подход и отношение ко всей вибрационной системе как цельному решению, а не как к отдельным компонентам. Эта статья затрагивает некоторые важные области, включая:
- выбор вибростенда;
- выбор системы управления;
- динамические процессы полезной нагрузки и их влияние на степени свободы всей системы;
- метод крепления полезной нагрузки;
- выбор акселерометров;
- предлагаемая стратегия управления — количество и расположение точек контроля;
- средство определения профиля испытания, включая фазу и когерентность;
- ожидания заказчика испытаний;
- требования к инженеру-испытателю.
Для обеспечения оптимального функционирования оборудования данные составляющие следует учитывать с первых моментов разработки технических условий и на всех этапах проектирования.
Приложение
Пример типичных результатов испытаний полезной нагрузки большого размера с применением нескольких соосных вибростендов.
Испытательная установка 420kN Quad — электродинамическая система вибрации «квадро» горизонтальной конфигурации, использовалась для испытания 3-тонного 8-футового стандартного контейнера. Применена матричная стратегия управления испытанием с одним управляющим акселерометром, расположенным рядом с каждым из углов стандартного контейнера.

Рис. 3. Установка для горизонтального испытания 3-тонного 8-футового стандартного контейнера
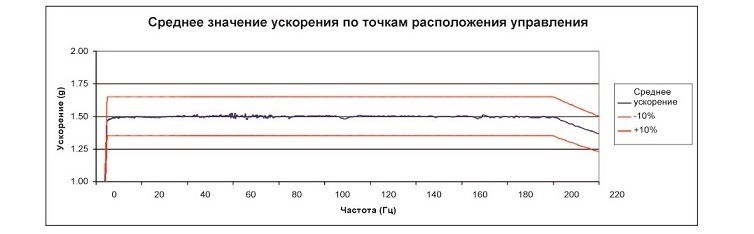
Рис. 4. График среднего ускорения при гармонической развертке
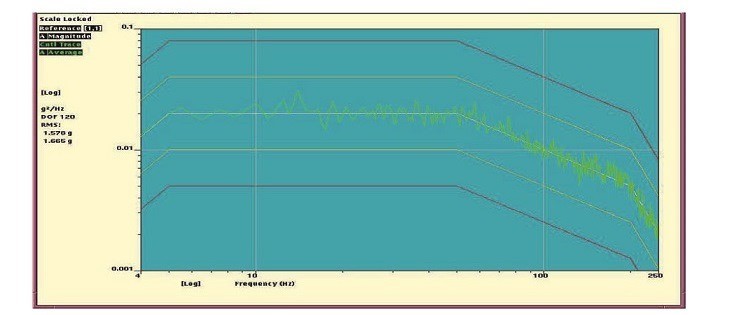
Рис. 5. График спектральной плотности ускорения усредненного сигнала управления

Рис. 6. Спектральная плотность ускорения для отдельных сигналов управления
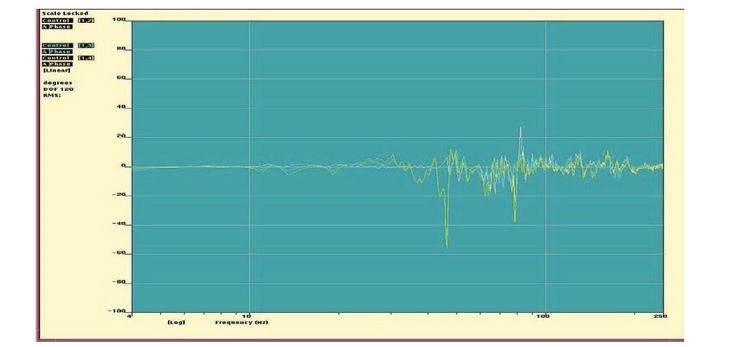
Рис. 7. Относительная фаза в контрольных точках
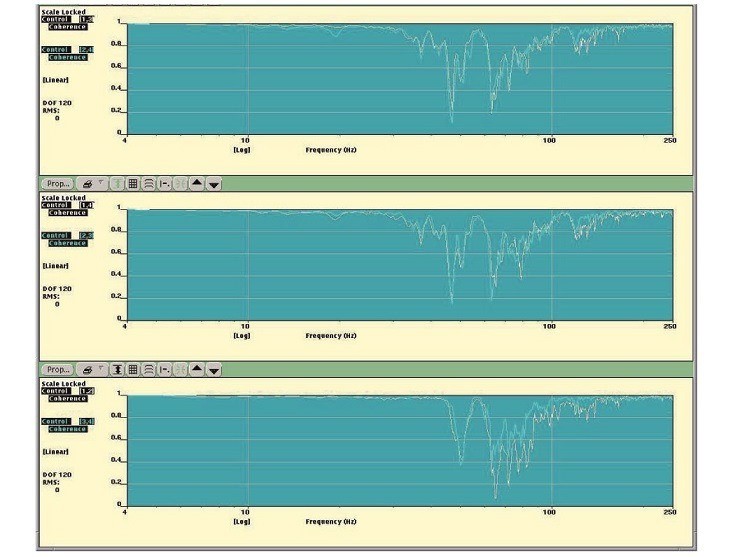
Рис. 8. Относительная когерентность в контрольных точках
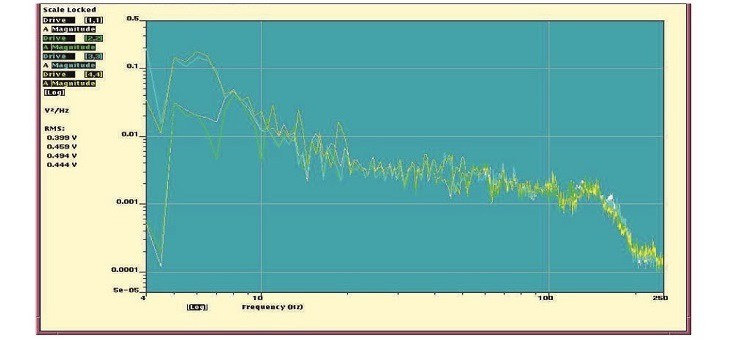
Рис. 9. График отдельных сигналов возбуждения
Материалы предоставлены Группой компаний Диполь: www.dipaul.ru
Понравилась статья? Поставьте лайк
Электроника Контроль, испытания, исследования Испытания на воздействие вибрации Воздействие гармонической вибрации Воздействие широкополосной случайной вибрации (ШСВ) Bruel & Kjaer VTS Limited Вибростенд
Читайте также
 Под ударом Пришло время поговорить об испытаниях на ударное воздействие
Под ударом Пришло время поговорить об испытаниях на ударное воздействие  Вибростенд: принцип действия. Испытательные вибрационные системы Sentek Dynamics Если вы впервые приобретаете испытательную вибрационную систему и решили изучить оборудование производителя Sentek Dynamics, вас может ошеломить большой объем информации
Вибростенд: принцип действия. Испытательные вибрационные системы Sentek Dynamics Если вы впервые приобретаете испытательную вибрационную систему и решили изучить оборудование производителя Sentek Dynamics, вас может ошеломить большой объем информации