



Первый летающий человекоподобный робот iRonCub3 поднялся в воздух
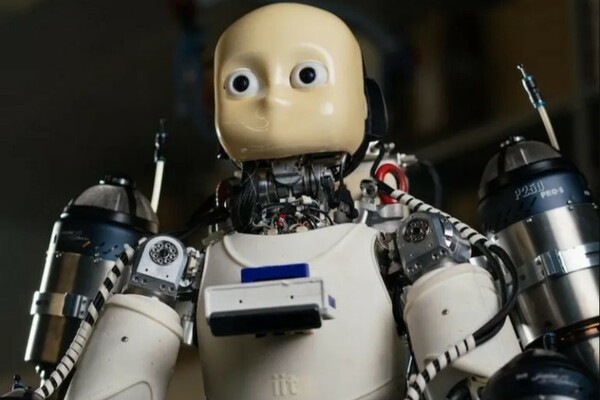
Ученые из Итальянского технологического института (IIT) в Генуе совершили прорыв в робототехнике, успешно осуществив первый полёт iRonCub3 — первого в мире летающего человекоподобного робота с реактивными двигателями, созданного для работы в реальных условиях. Это знаковое достижение, ставшее результатом двухлетней работы.
В ходе последних испытаний iRonCub3 продемонстрировал способность подниматься примерно на 50 сантиметров, сохраняя устойчивость. Для полета робот использует четыре реактивных двигателя: по два установлены на его руках и на специальном ранце, закреплённом на спине. Интеграция этих двигателей потребовала существенной модификации базовой конструкции робота iCub3, включая разработку нового титанового «позвоночника» для повышения прочности и добавление термостойких покрытий для защиты от экстремальных температур.
Общая масса iRonCub3 с двигателями составляет около 70 килограммов. Тяга реактивных турбин превышает 1000 Ньютонов, что обеспечивает роботу возможность не только зависать, но и совершать управляемые манёвры даже в условиях ветра. Температура выхлопных газов двигателей достигает 800 градусов Цельсия, что подчёркивает сложность решения инженерных задач, связанных с теплозащитой.

Главная сложность проекта заключалась в уникальной, несимметричной и удлинённой форме человекоподобного робота с распределённой массой и изменяемым центром тяжести. Это радикально отличает его от типичных симметричных дронов и потребовало разработки моделей балансировки в полёте. Модели должны учитывать сложную динамику робота и важное взаимодействие реактивной тяги с движениями его конечностей, которые постоянно меняют аэродинамические характеристики системы.
Для преодоления этих вызовов исследователи провели обширные эксперименты в аэродинамической трубе, выполнили вычислительные исследования аэродинамики и создали модели на основе искусственного интеллекта. Эти ИИ-модели, обученные на данных как компьютерного моделирования, так и реальных экспериментов, интегрированы в архитектуру управления роботом и способны в реальном времени оценивать действующие аэродинамические силы, обеспечивая стабильность полёта.
В ходе проектирования исследователи определили оптимальное размещение реактивных турбин для достижения максимального контроля и устойчивости во время полёта, а также эффективно решили задачу отвода тепла от двигателей. Робот был фундаментально переработан для работы в условиях воздушного передвижения, получив улучшенные системы управления тягой и продвинутые алгоритмы-планировщики для обеспечения согласованного взлёта и посадки.
Первые успешные полёты iRonCub3 были проведены в небольшой тестовой зоне IIT. В ближайшие месяцы испытания будут перенесены на оборудованную площадку в аэропорту Генуи, что позволит проводить эксперименты в более масштабных и реалистичных условиях. В перспективе iRonCub3 планируется использовать в сложных задачах, таких как поисково-спасательные операции, инспекция опасных сред (например, после катастроф или на промышленных объектах) и исследовательские миссии, где одновременно необходимы манипуляционные возможности человекоподобного робота и его уникальная воздушная мобильность.
Фото: IIT



23-06-2025 14:15 46
Учёные решили главную проблему квантового интернета: создан чип-переводчик сигналов с потерями всего 5%
Устройство создано на базе обычных CMOS-технологий
23-06-2025 11:55 106
