





Здесь мы собираем самые интересные статьи, интервью, репортажи и многое другое. Зарегистрируйте личный кабинет и вам будет открыт полный доступ
Выбери меня: электродинамическая вибрация или система многоповторных ударов. Какая из них соответствует вашим требованиям?
Анатолий Лютов, Иван Суходольский
Электродинамические (далее ЭД, ED) вибростенды использовались в течение многих лет для моделирования вибрации окружающей среды, испытаний изделий авиакосмической промышленности, автомобилестроения, железнодорожного транспорта и т. д. Любой профиль вибрации на актюаторе вибростенда может быть сформирован при помощи контроллера управления. Случайный профиль вибрации является наиболее реалистичным из-за его схожести с вибрацией окружающей среды. Наибольшую востребованность испытания на случайную вибрацию получили в авиации и космонавтике, автомобильной и железнодорожной промышленностях.
Перед запуском космический аппарат испытывают в условиях, близких к окружающим. Во время космических программ Mercury, Gemini и Apollo ЭД-актюаторы использовались для воспроизведения случайной вибрации (ВМС США, 1979). Профиль NAVMAT, показанный на рис 1, стал фактическим стандартом для виброиспытаний на случайную вибрацию в США.
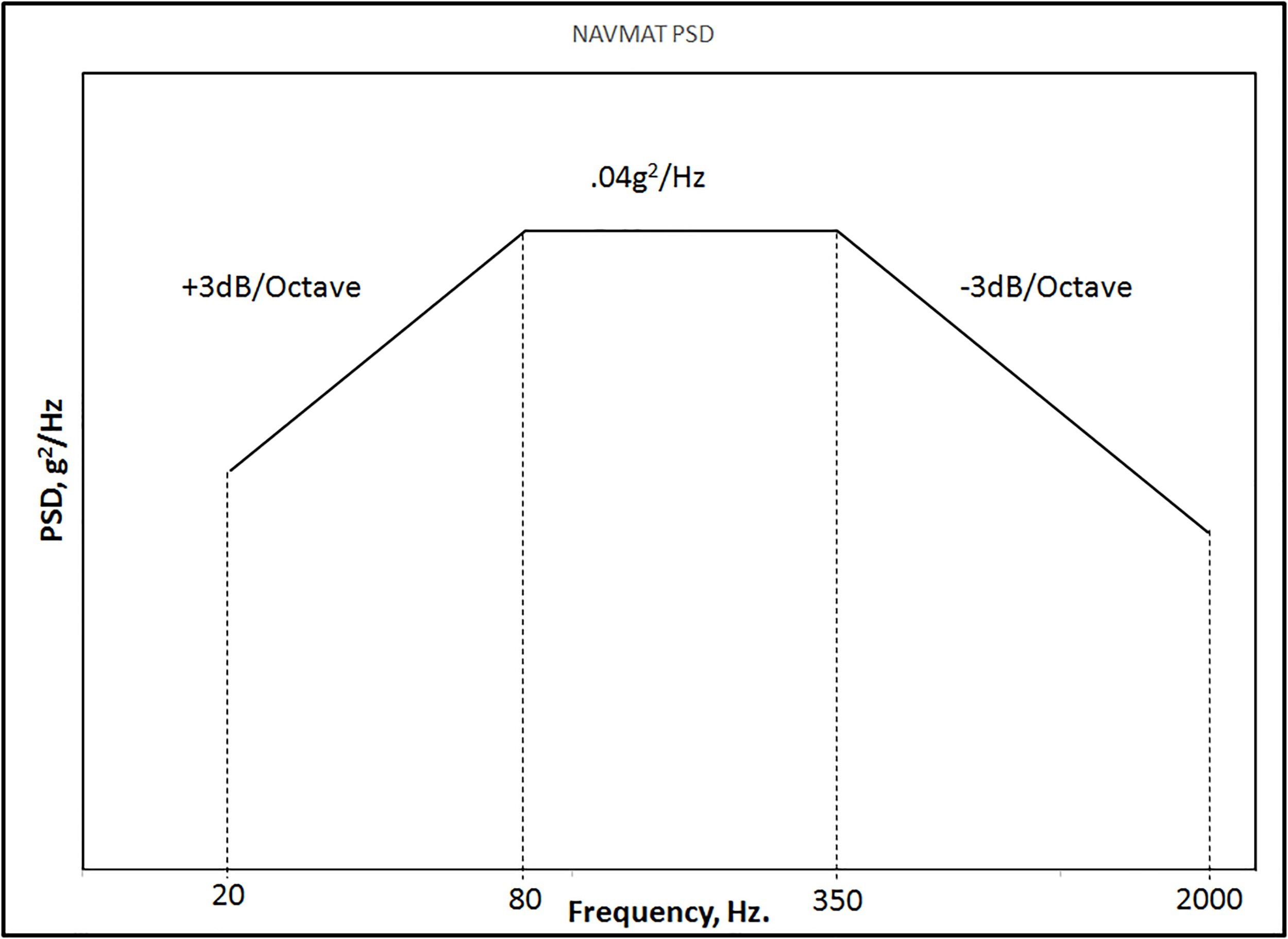
1. NAVMAT-профиль
Системы многоповторных ударов (RS-системы) были разработаны в 1989 году компанией Qualmark. В отличие от ED-систем, которые обеспечивают вибрацию с точно контролируемым спектральным содержимым вдоль одной оси, системы с многоповторным ударом обеспечивают вибрацию по всем шести координатам. Это означает, что тестируемая единица одновременно нагружается по трем осям, а также воспроизводится вращение вокруг этих осей. Сгенерированный спектральный профиль называется «псевдослучайный». В отличие от профиля NAVMAT спектральное содержимое системы с многоповторными ударами не контролируется в реальном времени, а является характеристикой стола, оснастки и реакции продукта на удары от исполнительных механизмов под столом.
Система повторяющихся ударов спроектирована таким образом, чтобы соответствовать очень специфической цели – достичь быстрого износа опытного изделия вплоть до поломки. Учитывая значительные различия в задачах, система повторяющихся ударов должна радикально отличаться от ED-системы. На рис 2 показана конструкция типичной RS-системы. Приводы монтируются под углом к поверхности стола, поэтому каждое ударное воздействие вызывает удар больше, чем по одной оси. Они также ориентированы на то, чтобы наносить удары по разным направлениям. Образец крепится к верхней части стола специальным приспособлением, которое отличается от крепежа, используемого на ED-актюаторе.
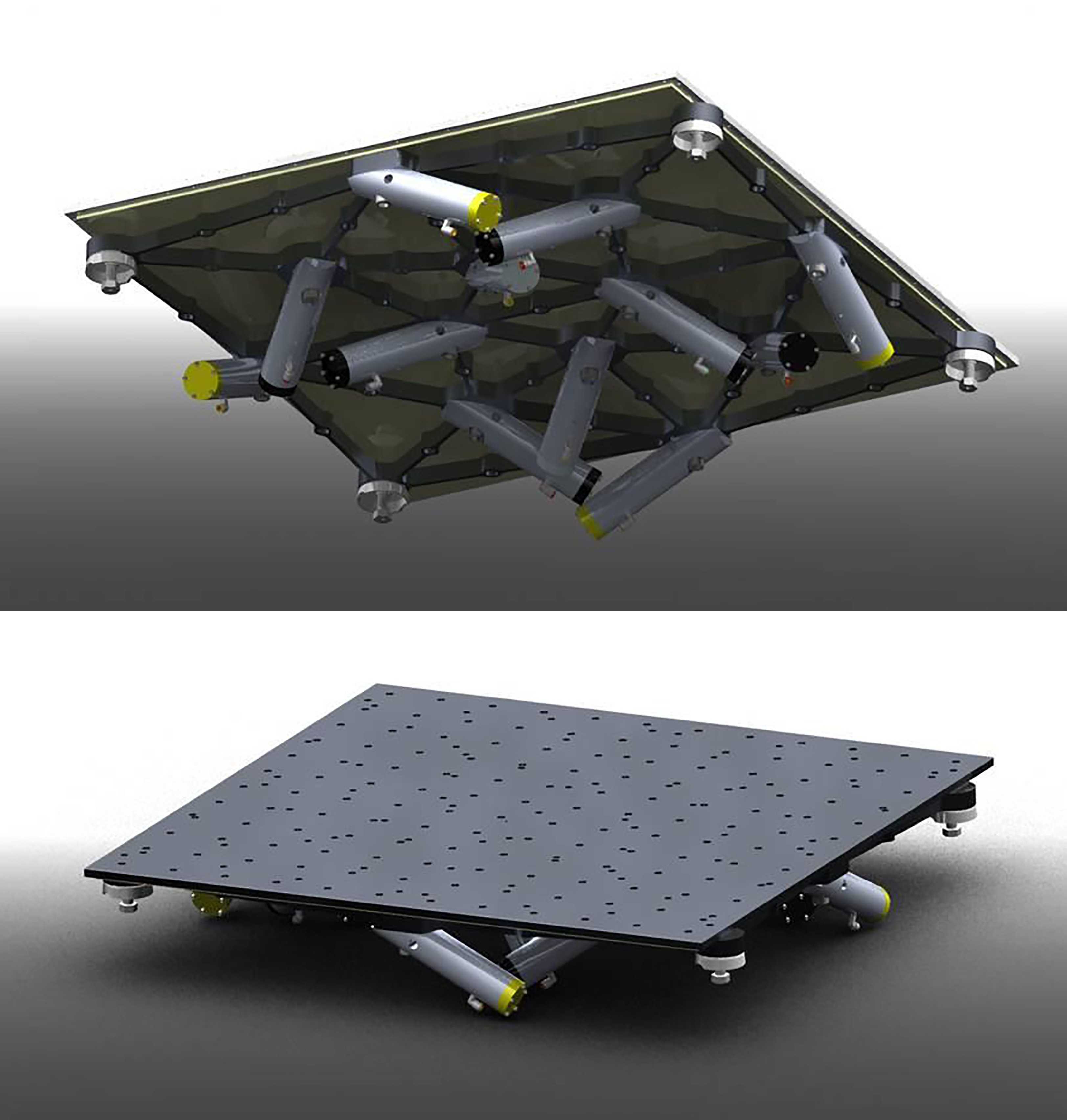
2. RS-системы
Сравнение спектральной плотности энергии
Случайная вибрация, генерируемая и той, и другой системами, выражается в «g2/Гц» и формой графика спектральной плотности мощности (PSD – power spectral density). Выводы об эффективности испытаний двух систем часто основаны на сравнении этих показателей. Однако их значительно различающаяся конструкция влияет на вызываемые напряжения внутри образца, что может привести к ошибочным выводам относительно преимущества одной системы над другой.
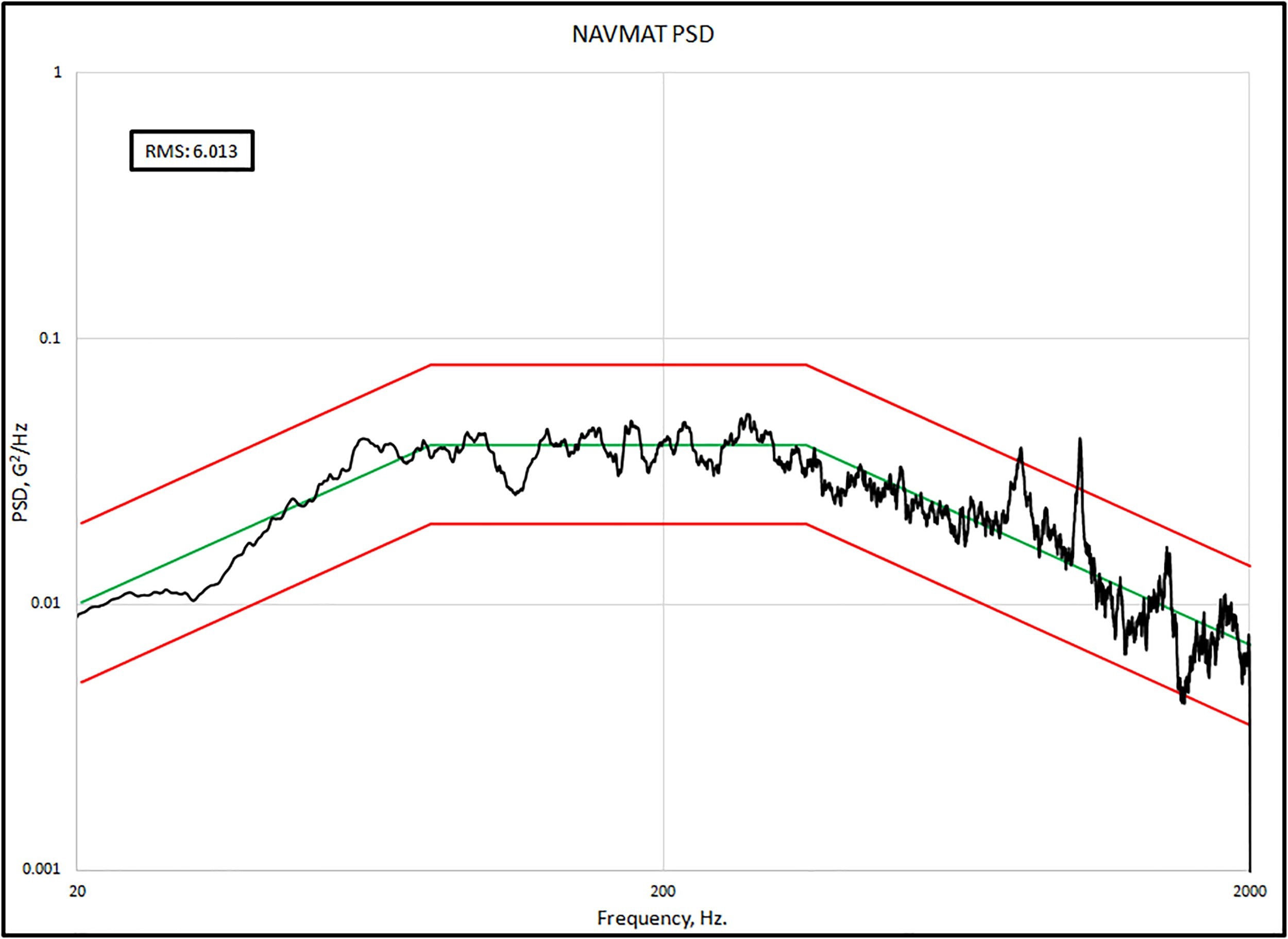
3. NAVMAT-профиль
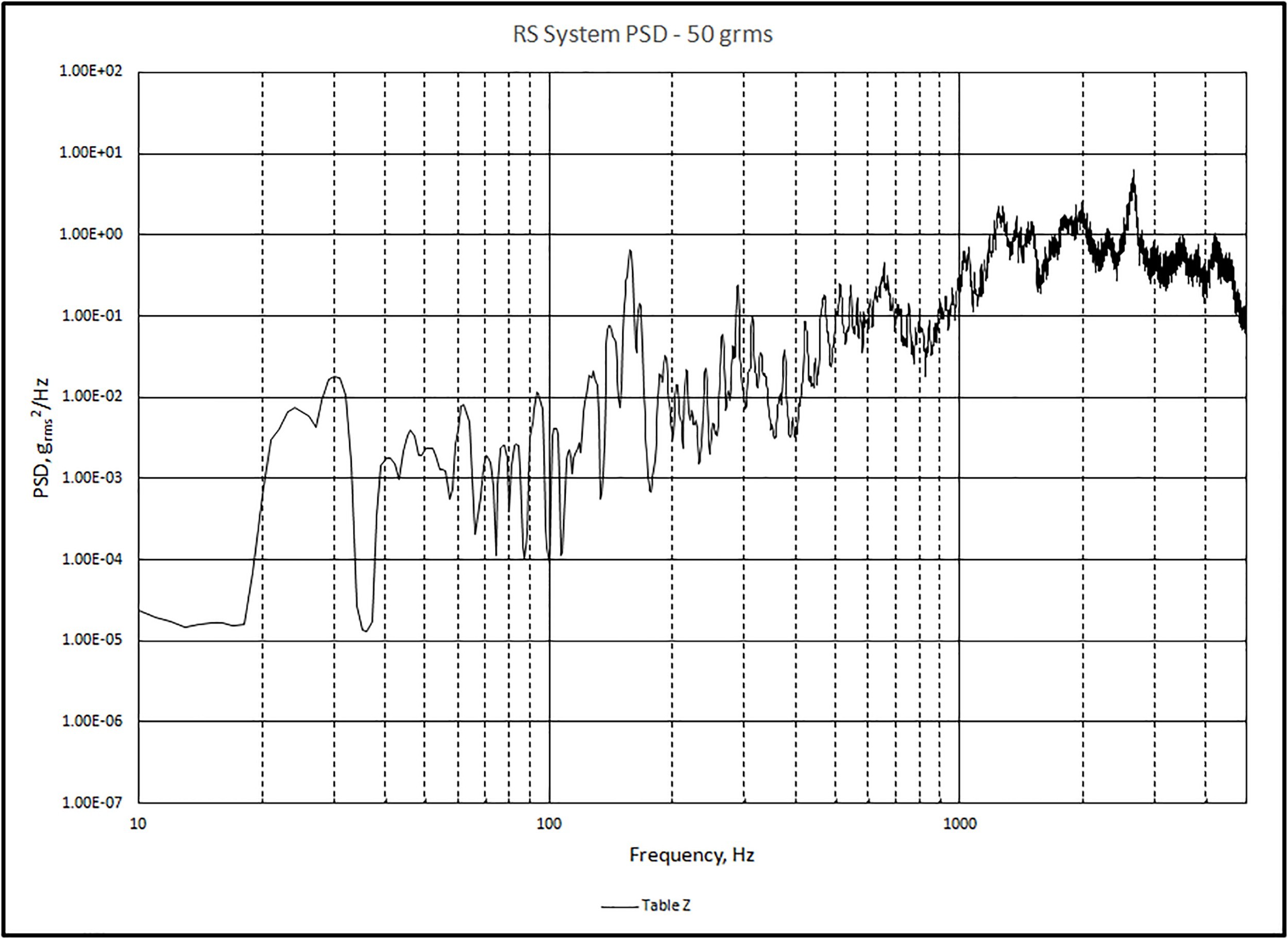
4. PSD RS-системы
Понимая различия между системами, пользователь может максимально эффективно использовать обе системы, чтобы достигать поставленных целей: создание максимально надежного продукта, снижение затрат на гарантийное обслуживание, увеличение времени работы продукта и повышение удовлетворенности клиентов. Как указано выше, PSD ED-системы можно контролировать и формировать. Измеренная спектральная плотность мощности в ED-системе, запрограммированной на профиль NAVMAT, показана на рис 3. Верхний предел частоты более крупной ED-системы составляет около 2000 Гц, что ограничивает способность возбуждать резонансные частоты небольших электронных компонентов. Рассмотрим PSD стола системы многоповторных ударов (рис 4). Форма PSD не плоская, как для случайного сигнала, система имеет значительную энергию выше 2000 Гц, что повышает ее эффективность для испытания меньших сборок и компонентов с более высокими резонансными характеристиками, такими как МПП с SMD-монтажом электронных компонентов.
Сравнение сигналов реального времени
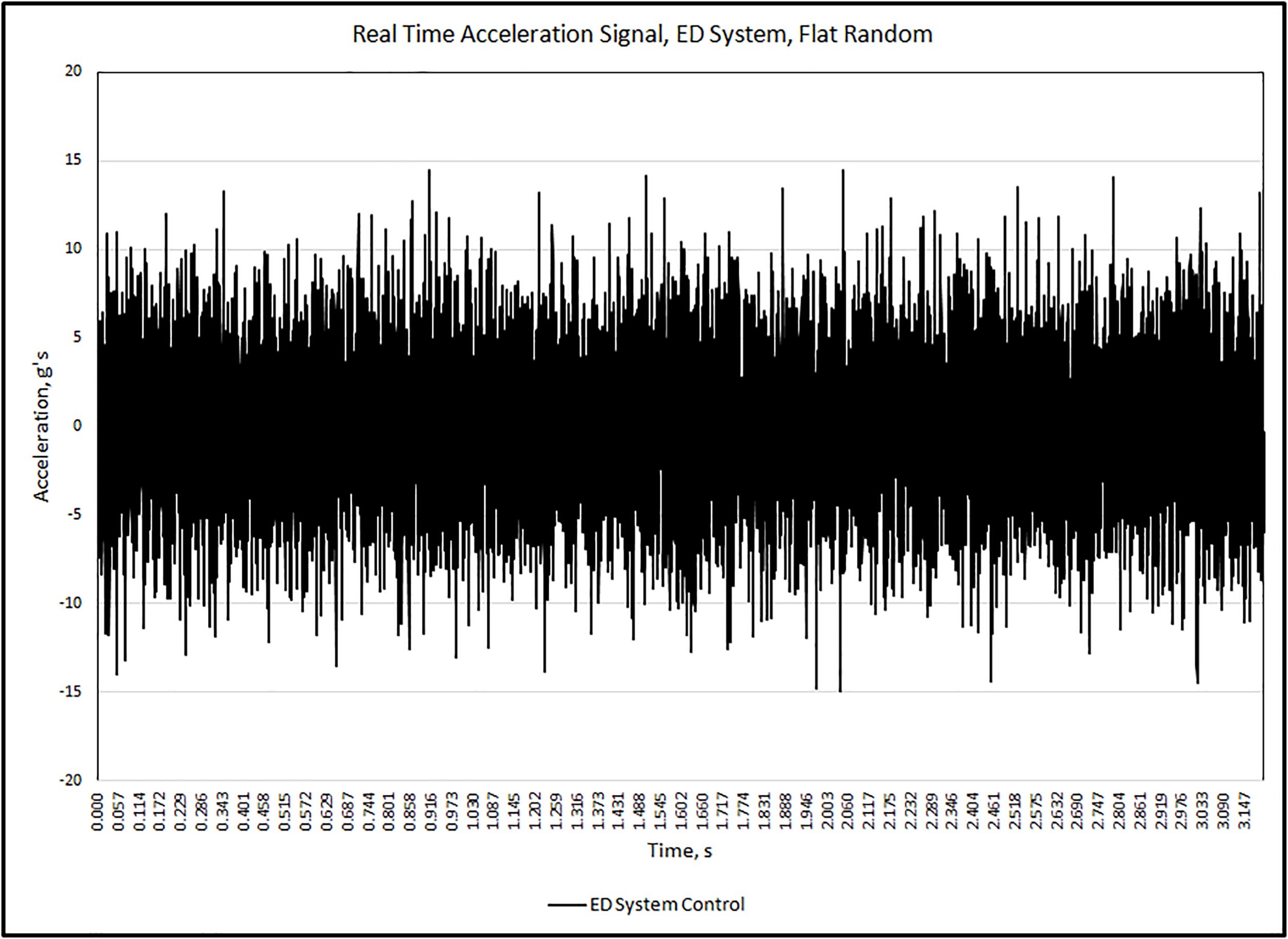
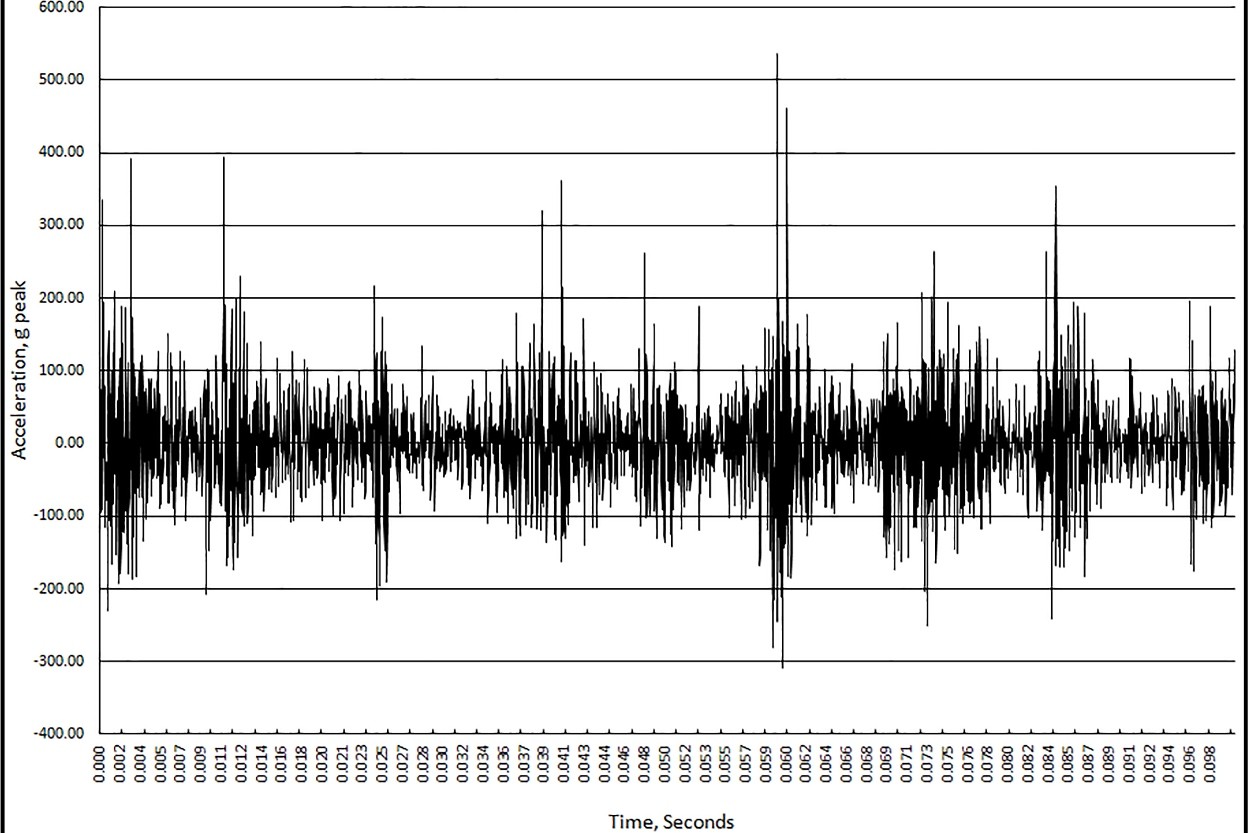
5. Сигнал ускорения ED-системы
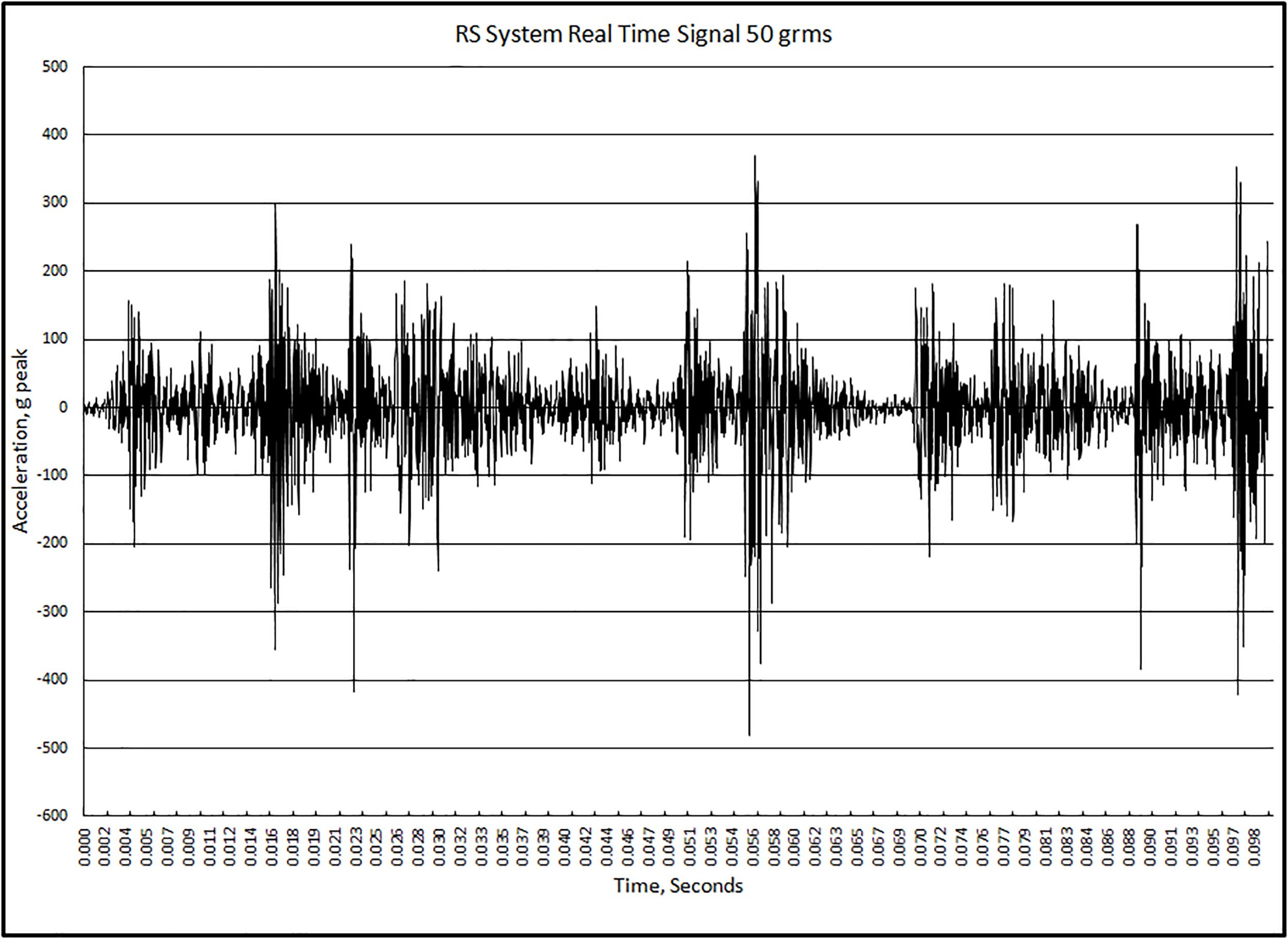
6. Сигнал ускорения RS-системы
Различия в воздействии становится наглядным, когда исследуются сигналы ускорения в реальном времени от обеих систем. На рис 5 показан сигнал ускорения от ED-системы во время случайной вибрации. Важно, что пиковые уровни ускорения остаются в пределах полосы пропускания 3 сигма. Это типичная характеристика случайной вибрации при генерации контроллером. Кроме того, актюатор имеет ограничение по максимальному размаху, и контроллер системы управления вибрации будет ограничивать движение актюатора. Сигнал реального времени от RS-системы показан на рис 6. Первое различие – мгновенные уровни ускорения. Резкий скачок ускорения появляется, когда воспроизводится соударение привода со столом, причем последующий сигнал и падение амплитуды являются характеристиками отклика стола. Перекрывающиеся удары исполнительных механизмов четко видны. Показанное здесь измерение относится к оси Z, перпендикулярной верхней части стола. В RS-системе максимальное мгновенное ускорение намного выше, чем в ED-системе. Максимальные уровни ускорений, показанные в этом примере, находятся в диапазоне 400-500 g.
Дополнительные эффекты последующего возбуждения
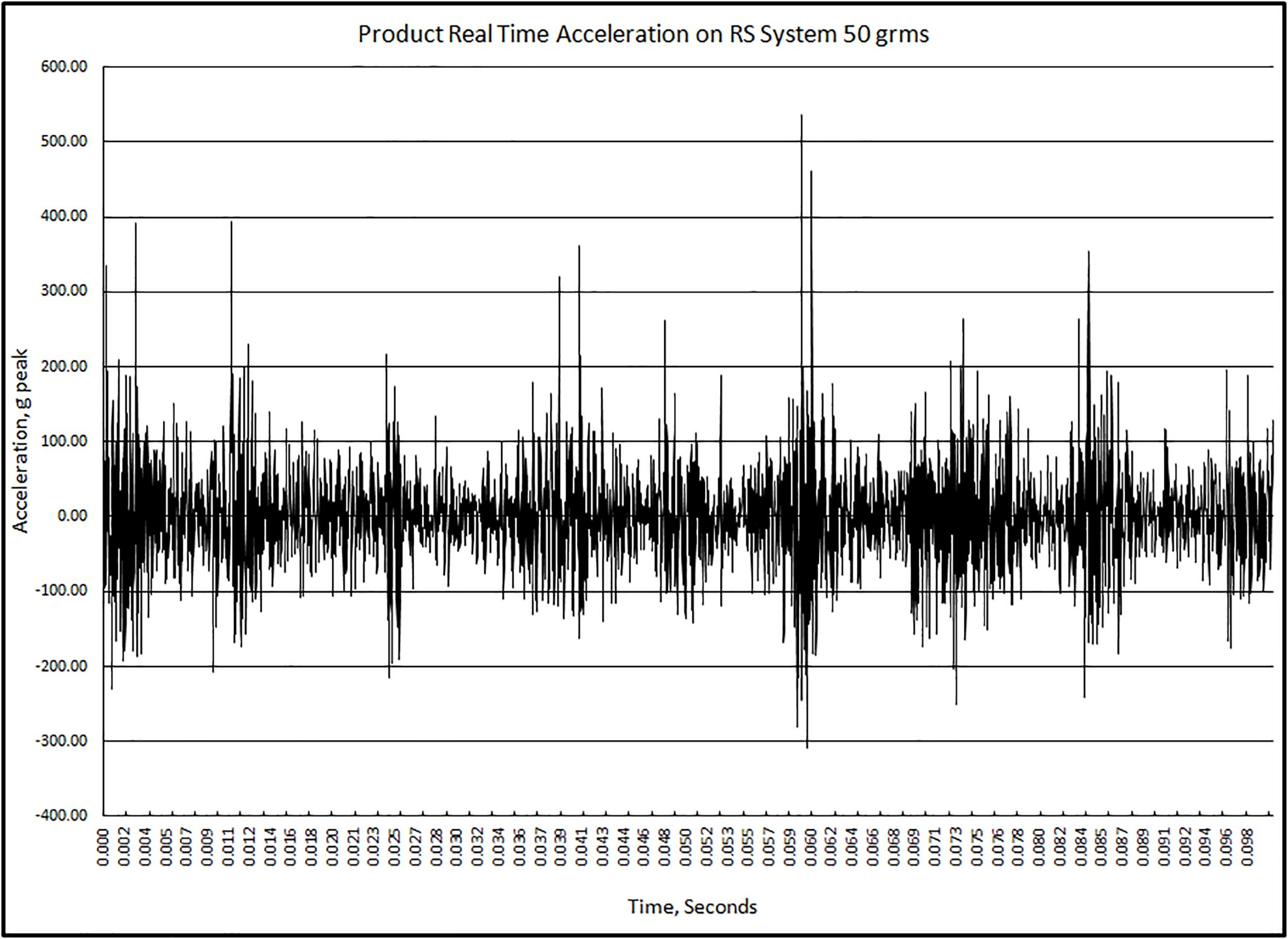
7. Записанный сигнал на тестируемом изделии
Подробная оценка фактической реакции испытуемого образца в двух системах показывает еще одно ключевое различие. С помощью ED-системы PSD дает четкое определение входного сигнала вибрации на образце. В RS-системе PSD, измеренная на столе, является только частью этого сигнала. Сила удара, воздействующая на стол, переносится на сам продукт с помощью приспособления. На рис 7 показаны сигналы времени, записанные на изделии при повторяющемся ударе. Пики, связанные с ударами, хорошо видны в этих временных сигналах. Эти пики демонстрируют механический удар на изделии и его собственные резонансные частоты. Допускаем, что эти частоты не будут присутствовать в PSD, измеренные на столе. Усталостные явления в образце возникают, в основном, на резонансной частоте устройства или компонента. Это означает, что удары в RS-системе быстро вызывают усталость в образце независимо от наличия и уровня этих резонансных частот на столе.
Повторяющийся удар: проведение эксперимента
Сложное и случайное движение изделия, возникающее в результате повторного ударного возбуждения, может затруднить интуитивное понимание эффектов ударов. Для того, чтобы понять, какой эффект оказывает RS-система на изделие, был проведен и записан на видео эксперимент. Эксперимент был проведен в лаборатории компании Qualmark, Денвер, США. Эффекты хорошо заметны на высокоскоростном видео (5 000 кадров в секунду) – goo.gl/8qyckr. Когда движение платы в высокоскоростном видео сравнивается с возбуждением столешницы и оснастки, ясно, что смещение стола и крепления очень низкое, а отклик образца платы на передаваемую вибрацию выше.
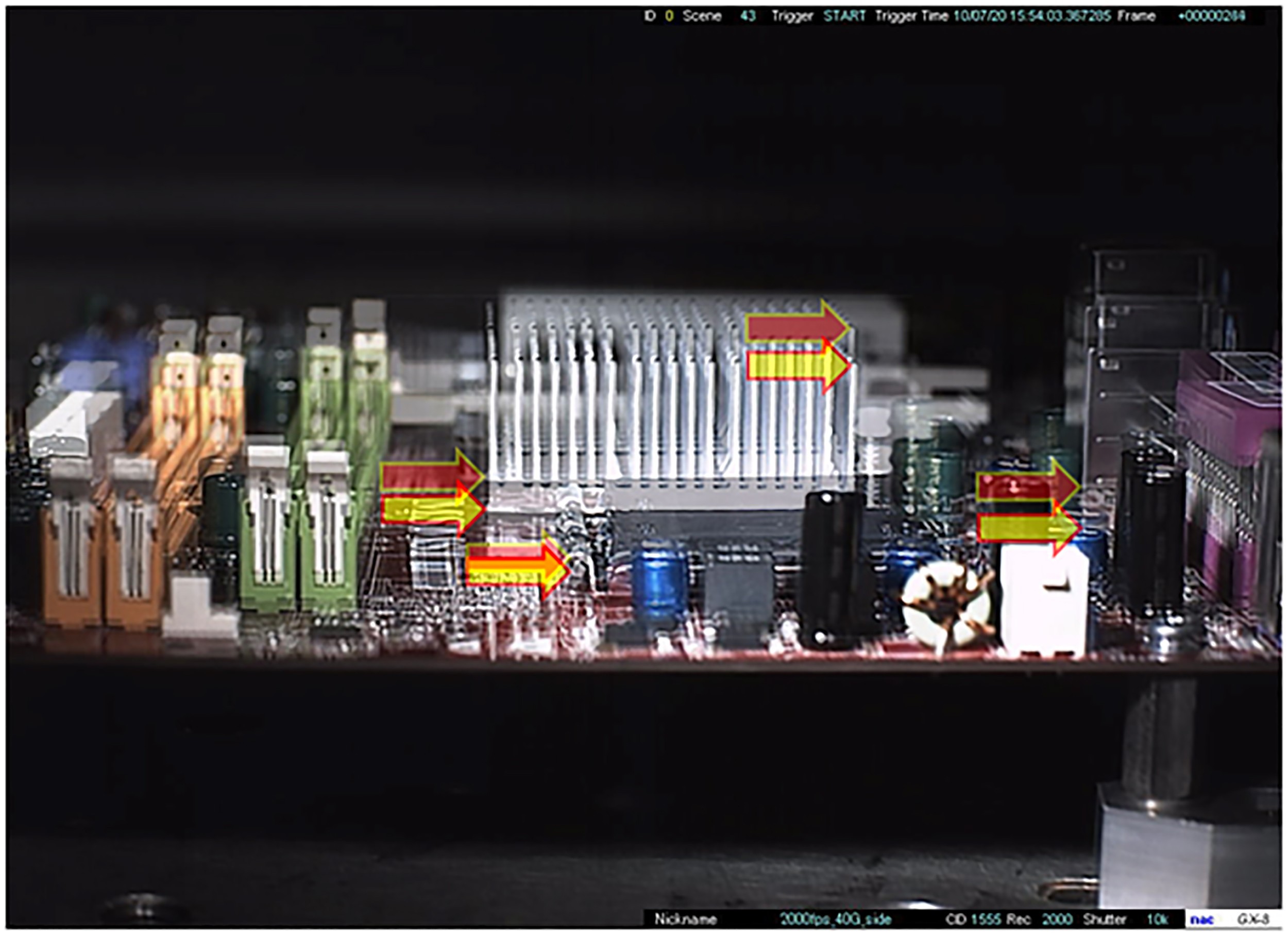
8. Предельное движение компонентов на плате
Когда плата сгибается, деформация индуцируется в точках крепления для всех компонентов на плате.
Предельные движения показаны на рис 8, где приведены для сравнения два наложенных кадра из высокоскоростного видео с указанием местоположений. Анализ движения видео позволяет отслеживать смещение выбранных целей. Затем можно вычислить скорость и ускорение этих точек. Этот анализ описывает результаты отслеживания трех разных точек на тестируемой печатной плате:
- плата в сборе в целом;
- верхняя часть большого электролитического
конденсатора; - передняя часть реле.
Анализ проходит одновременно по двум осям.
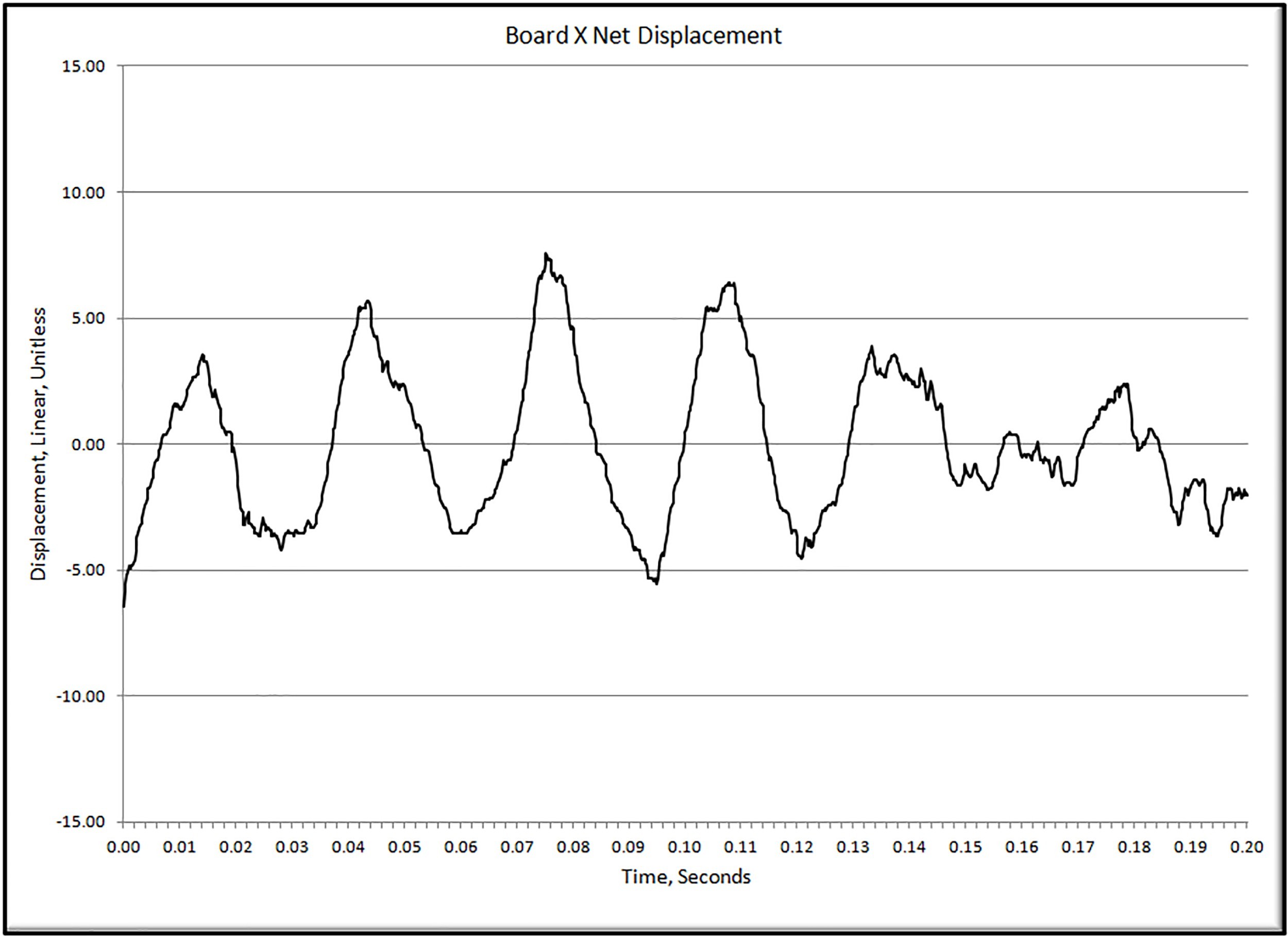
9. График перемещения платы
На рис 9 представлен график данных о перемещении самой платы. Удар вызвал большие медленные сдвиги в печатной плате, хотя воспроизведения вибраций на низких частотах не было.
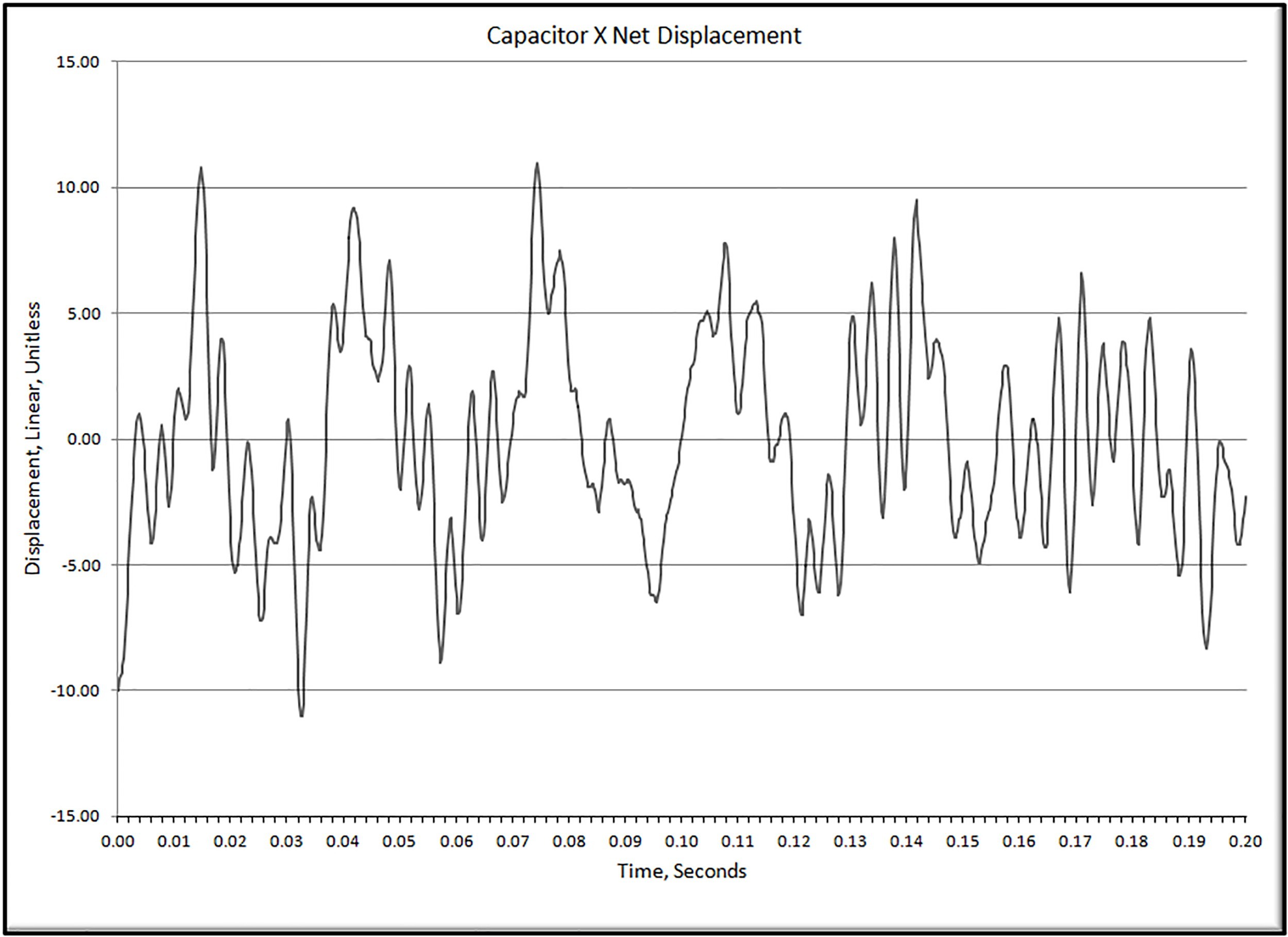
10. График смещения конденсатора
На рис 10 показан график смещения большого конденсатора. Так как конденсатор зафиксирован на плате, то можно установить при помощи наложения графиков, являются ли эти сдвиги резонансным откликом конденсатора.
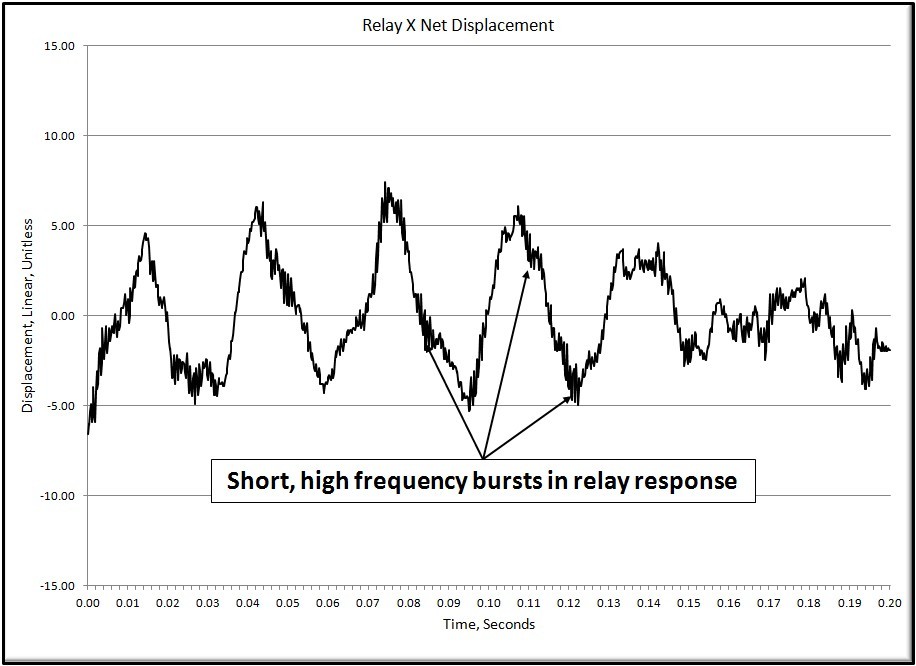
11. График смещения реле
На рис 11 показано смещение малого реле. Как и в случае с большим конденсатором реле перемещается вместе с платой. Перемещение включает короткие высокочастотные всплески движения с частыми интервалами.
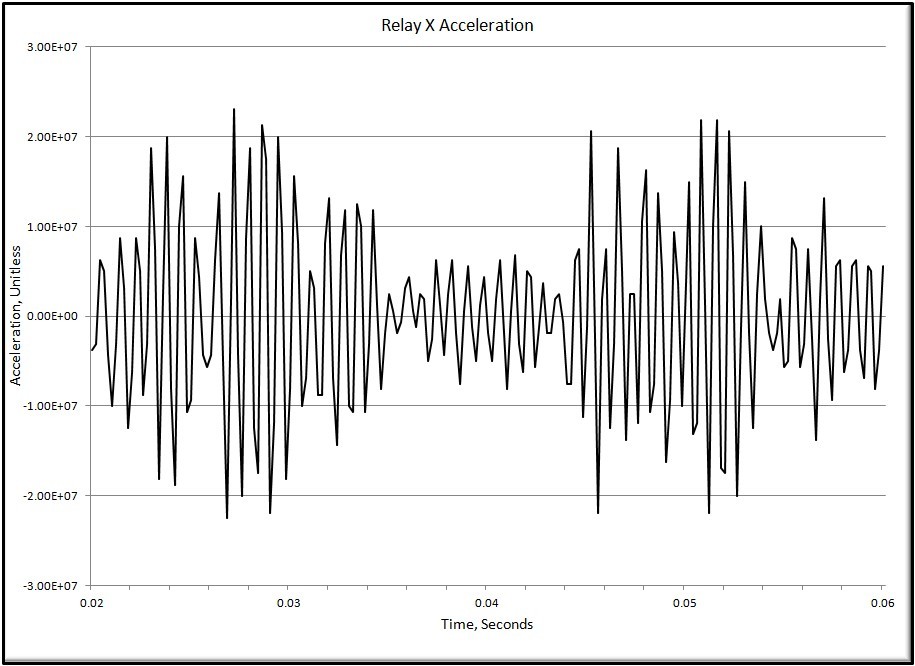
12. График ускорения реле
На рис 12 показано ускорение реле, рассчитанное по данным перемещения. Из формы волны видно, что реле реагирует на удары от приводов с резким ускорением, за которым следует по кругу вниз, повторяя тем самым траекторию движения привода.
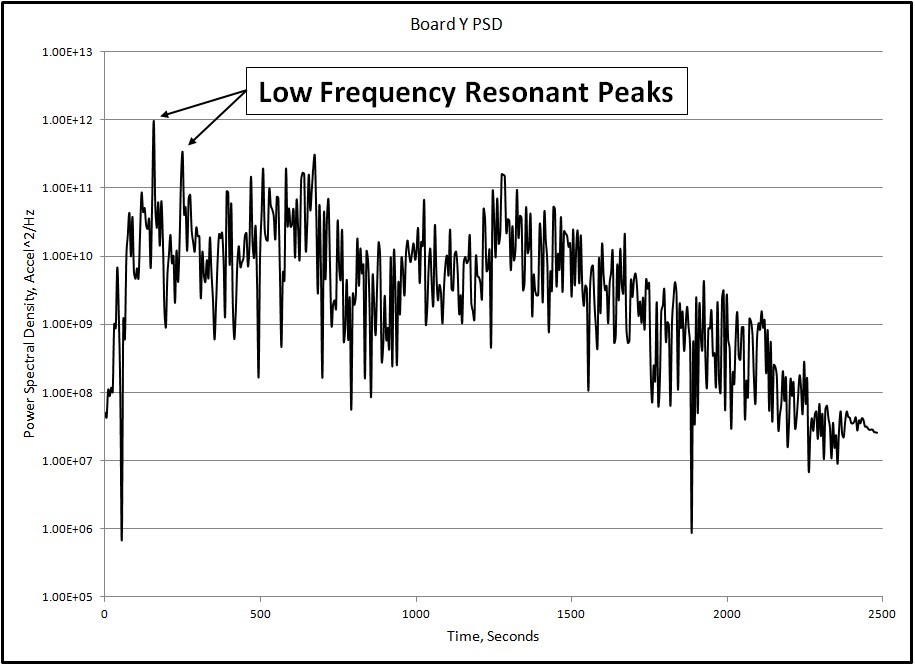
13. PSD платы
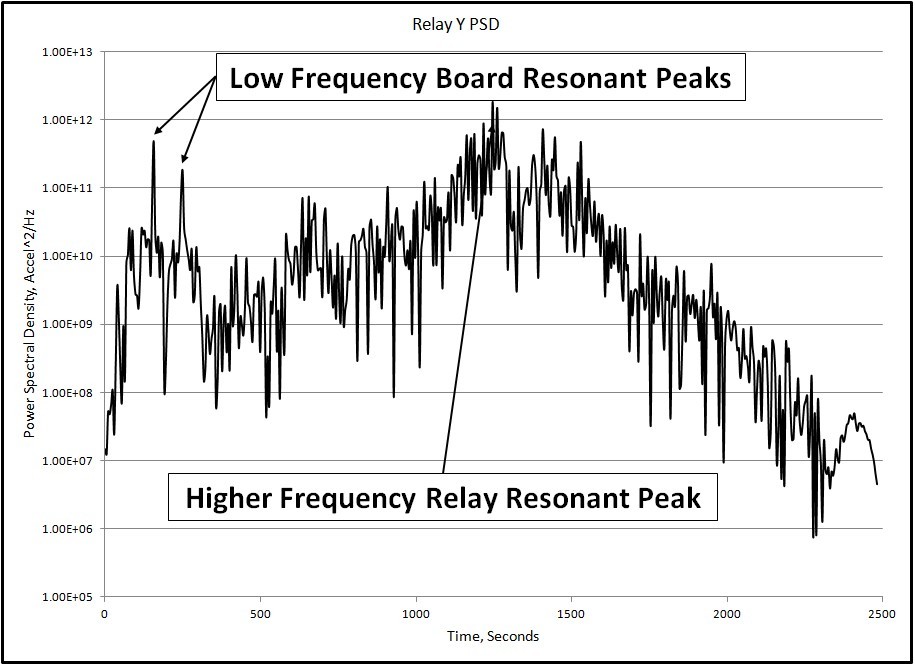
14. График смещения конденсатора
Поскольку реле резонирует на более высокой частоте (~ 1300 Гц на основе графика ускорения), у него есть время, чтобы резонировать между ударами исполнительных механизмов. PSD-графики были созданы из ускорения оси Y платы и реле. Они показаны на рис 13 и 14. С учетом этих данных можно изучить характеристики частотной области платы и реле.
Два низкочастотных пика PSD платы, вероятно, связаны с наблюдаемым резонансным откликом платы при данных смещениях. Как и ожидалось, эти два пика дублируются в реле PSD, поскольку реле двигалось с платой. Тем не менее, PSD реле четко отличается от PSD платы на более высоких частотах, достигая пика на 1300 Гц, совпадающего с данными ускорения реального времени от реле.
15. Линии слежения на ED-системе
16. Линии слежения на RS-системе
Еще одно интересное различие в движении компонентов в ED- и RS-системах может быть показано с помощью видеокамеры с высокой скоростью записи. На рис 15 показаны линии слежения, которые были получены после отслеживания точки на акселерометре, смонтированном на изделии в ED-системе. Как и ожидалось, точка перемещалась по одной оси. Результаты отслеживания одного и того же компонента в системе повторяющихся ударов показаны на рис 16. Хотя этот анализ показывает только две оси, аналогичные различия наблюдаются на третьей оси. Очевидно, что траектория, описываемая на рис 16, достоверно подтверждает, что RS-система работает в трех направлениях.
Может ли ED-система воспроизвести эту траекторию поочередно в разных направлениях? Наглядные отметки (рис 15) показывают, что достичь этого невозможно, даже если мы будем поочередно поворачивать изделие в плоскостях испытаний.
Различные воздействия, различные цели
Данные различия не приводят к опровержению эффективности любой из этих систем. Они подчеркивают тот факт, что системы разработаны для достижения различных целей в общих задачах по надежности. В целом ED-системы созданы для проверки соответствия и спецификации и испытаний ПСИ, в то время как RS-системы идеально подходят для тестирования, ориентированного на отказ и доработку пилотного изделия.
Заключение
ED- и RS-системы генерируют вибрацию разными способами, вызывая различные усталостные характеристики.
В конце 60-х годов прошлого столетия было достаточно использовать ED-системы, чтобы предложить предприятиям высококачественные приборы.
Сейчас зарождается новый подход к организации виброиспытаний изделий: сначала ускоренное тестирование пилотных изделий RS-системами и доработка конструкции. Этот цикл продолжается до тех пор, пока пилотное изделие успешно не пройдет ускоренные испытание. После того, как изделие выпущено в серию, его испытывают на ED-системах.
Со стороны это кажется необычным «сумасшествием». Сущность подхода заключается в том, что производитель хочет добиться высокого качества изделий уже на ранних этапах конструирования образца. На самом простом эксперименте мы убедились, что в RS-системах можно вызывать усталостные явления в образце на тех уровнях PSD, которые недостижимы ED-системой. Если к изделиям специального назначения предъявляются повышенные требования по качеству, то пренебрегать этим тестом опрометчиво.
В то же время RS-системы не являются панацеей от всех проблем. Их нельзя использовать повсеместно. Для ПСИ нет лучшего оборудования для виброиспытаний, чем ED-система.
Поэтому решать вопрос о выборе системы необходимо комплексно, учитывая особенности разных стадий производства изделия.
Чтобы проработать и внедрить ускоренные испытания на вашем предприятии, отправляйте запрос на электронную почту test@ostec-group.ru c пометкой «Ускоренные испытания». Обязательно укажите размеры образцов, их массу и ускорения, на которых вы сейчас проводите ваши испытания.
Статья опубликована в журнале «Вектор высоких технологий».
Бесплатная подписка на журнал: https://ostec-group.ru/group-ostec/pressroom/journal/podpiska/
Официальный сайт Группы компаний Остек: https://ostec-group.ru/
Понравилась статья? Поставьте лайк
Электроника Производство электроники Контроль, испытания, исследования Испытания на воздействие вибрации Вибростенд Испытания на комплексное воздействие
Читайте также
 Вибростенды для транспортных испытаний Управление несколькими вибростендами при использовании методов MIMO для проведения транспортных испытаний объектов большого размера
Вибростенды для транспортных испытаний Управление несколькими вибростендами при использовании методов MIMO для проведения транспортных испытаний объектов большого размера  Под ударом Пришло время поговорить об испытаниях на ударное воздействие
Под ударом Пришло время поговорить об испытаниях на ударное воздействие  Вибростенд: принцип действия. Испытательные вибрационные системы Sentek Dynamics Если вы впервые приобретаете испытательную вибрационную систему и решили изучить оборудование производителя Sentek Dynamics, вас может ошеломить большой объем информации
Вибростенд: принцип действия. Испытательные вибрационные системы Sentek Dynamics Если вы впервые приобретаете испытательную вибрационную систему и решили изучить оборудование производителя Sentek Dynamics, вас может ошеломить большой объем информации 

